# 视图矩阵
我们需要将世界坐标系转换到观察者坐标系中;通过视图矩阵可以进行坐标系的变换。
模型矩阵是相对世界坐标系的变换,但是大多数情况下,我们更关注物体相对于观察者的坐标变化,这决定了最终在 canvas 上渲染的结果
将世界坐标系通过旋转平移至观察者坐标系,这个旋转 R 和平移 T 矩阵的组合矩阵 M = T * R,则视图矩阵为 view = M 的逆矩阵。
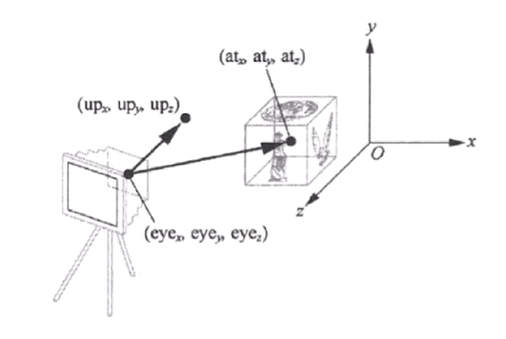
首先我们看下图,左侧的是相机坐标系的位置,右侧是物体在世界坐标系的位置,我们需要变换将世界坐标系转换为观察者坐标系下;所有的物体都相对于观察者的位置。
- 视点:(eyex, eyey, eyez) 表示相机坐标
- 观察目标点: (atx, aty, atz)
- 上方向:(upx, upy, upz)
根据上面三个分量就确定了观察者的状态。也是根据这三个矢量来创建一个视图矩阵。然后将该矩阵传给顶点着色器。之所以称为视图矩阵,是因为它最终影响了显示在屏幕上的视图,也就是观察者观察到的场景。
然后我们需要将物体的坐标转换到以视点、观察目标点、上方向这三个基量组成的坐标系中。根据下面的步骤:
- 计算摄像机镜头方向 forwrad = (target - eye) 归一化处理 forwrad = forwrad / |forwrad| forwrad 也就是 z 轴的基向量
- 根据 up vector 和 forwrad 确定摄像机的 side 向量归一化 up vector: viewUp' = viewUp / |vieUp| 叉积:side = cross(forwrad, viewUp') side 向量也就是垂直于 up 以及 forward 向量。
- 根据 forwrad 和 side 计算 up 向量:叉积:up = cross(side, forwrad)(注意此 up 向量是垂直于 forwrad 和 side 构成的平面)也就是原始的 up 向量在垂直于 side 跟 forward 方向的 投影。
叉乘获取的是垂直平面的向量
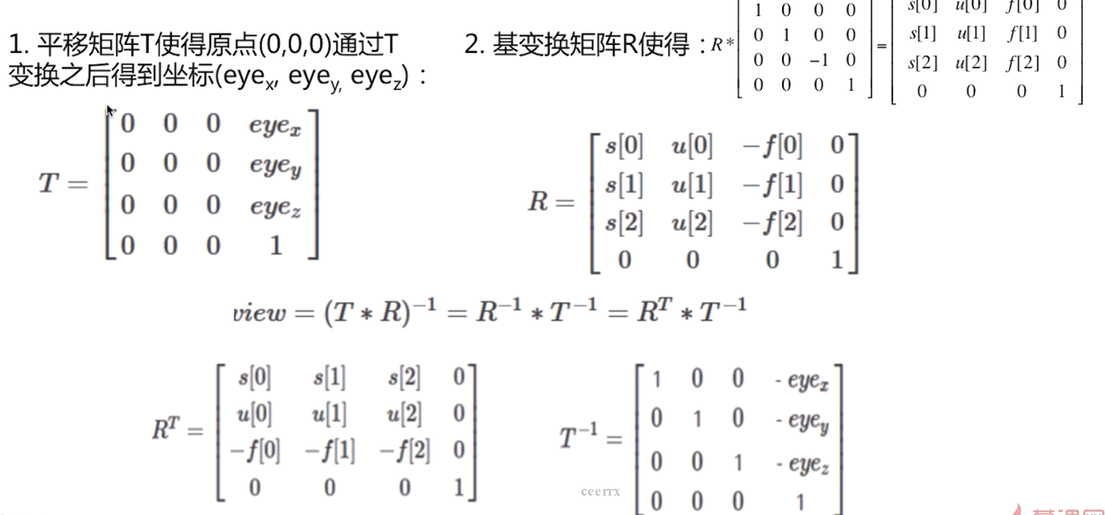
数学表达式推导:
先通过平移矩阵进行变换,然后进行通过基变换得到在视空间下的坐标。
# 示例代码
Matrix4.prototype.setLookAt = function(eyeX, eyeY, eyeZ, centerX, centerY, centerZ, upX, upY, upZ) {
var e, fx, fy, fz, rlf, sx, sy, sz, rls, ux, uy, uz;
// forward 向量
fx = centerX - eyeX;
fy = centerY - eyeY;
fz = centerZ - eyeZ;
// forward 归一化
rlf = 1 / Math.sqrt(fx*fx + fy*fy + fz*fz); // 向量的模
fx *= rlf;
fy *= rlf;
fz *= rlf;
// side 向量- forward 与 up 向量的叉乘
sx = fy * upZ - fz * upY;
sy = fz * upX - fx * upZ;
sz = fx * upY - fy * upX;
// 归一化 side 向量
rls = 1 / Math.sqrt(sx*sx + sy*sy + sz*sz);
sx *= rls;
sy *= rls;
sz *= rls;
// 通过叉乘得到垂直于 forward 以及 side 向量.
ux = sy * fz - sz * fy;
uy = sz * fx - sx * fz;
uz = sx * fy - sy * fx;
// 转置矩阵
e = this.elements;
e[0] = sx;
e[1] = ux;
e[2] = -fx;
e[3] = 0;
e[4] = sy;
e[5] = uy;
e[6] = -fy;
e[7] = 0;
e[8] = sz;
e[9] = uz;
e[10] = -fz;
e[11] = 0;
e[12] = 0;
e[13] = 0;
e[14] = 0;
e[15] = 1;
// 平移矩阵的逆矩阵 乘以转置矩阵
return this.translate(-eyeX, -eyeY, -eyeZ);
};
Matrix4.prototype.translate = function(x, y, z) {
var e = this.elements;
e[12] += e[0] * x + e[4] * y + e[8] * z;
e[13] += e[1] * x + e[5] * y + e[9] * z;
e[14] += e[2] * x + e[6] * y + e[10] * z;
e[15] += e[3] * x + e[7] * y + e[11] * z;
return this;
};
视图变换只是将模型坐标转换为了基于视空间下的坐标;还得需要基于投影变换,进行规范化坐标,最终进行渲染。
阅读量: