投影矩阵分为正交投影矩阵(正射投影矩阵)以及透视投影矩阵;
投影变换完成的是如何将三维模型显示到二维视口上,这是一个三维到二维的过程。你可以将投影变换看作是调整照相机的焦距,它模拟了为照相机选择镜头的过程。投影变换是所有变换中最复杂的一个。
# 透视投影推导
透视投影是为了模拟人眼的近大远小的一个特性。
# 视椎体
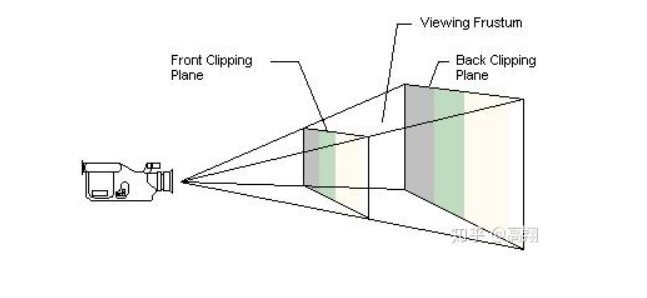
视锥体是一个三维体,他的位置和摄像机相关,视锥体的形状决定了模型如何从视空间投影到屏幕上。透视投影使用棱锥作为视锥体,摄像机位于棱锥的椎顶。该棱锥被前后两个平面截断,形成一个棱台,叫做 View Frustum,只有位于 Frustum 内部的模型才是可见的。我们也通常称这个为裁剪空间,在这个裁剪空间中有两个平面比较特殊,我们分辨称为近裁剪平面(near clip plane)和远裁剪平面(far clip plane)。
# 投影矩阵的本质
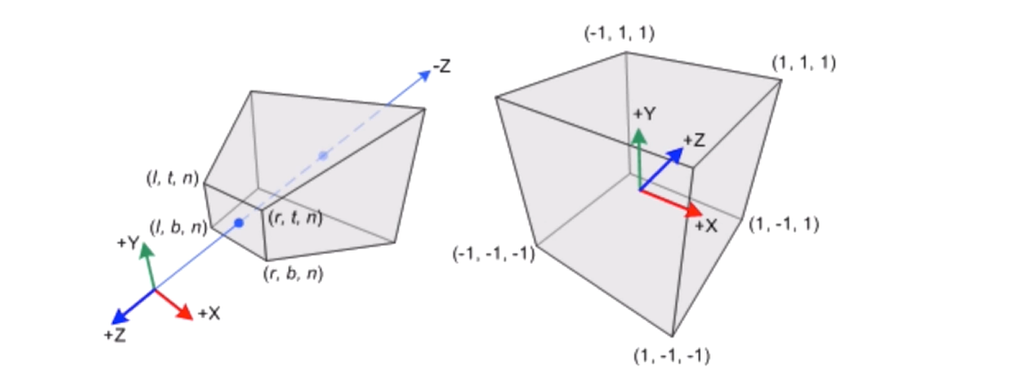
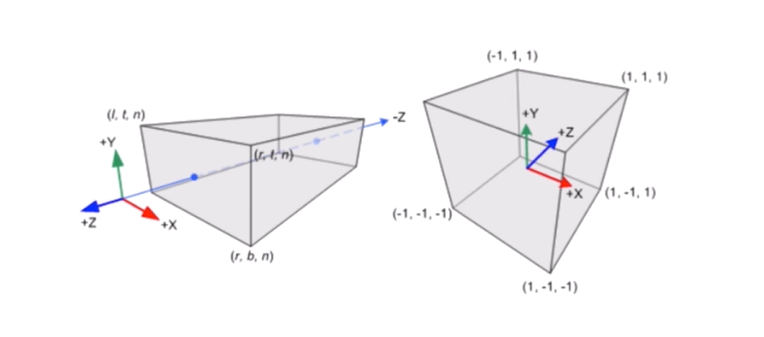
投影矩阵有两个目的: - 首先是为投影做准备。这是个迷惑点。虽然投影矩阵的名称包含了投影二字,但是它并没有进行真正的投影工作,而是在为投影做准备。真正得投影发生在后面得齐次除法(homogeneous division)过程中。经过投影矩阵的变换后,顶点的 w 分量会具有特殊的意义。 - 其次是对 x ,y,z 分量进行缩放。如果用视锥体的6个裁剪平面来进行裁剪会比较麻烦,而经过投影矩阵的缩放后,就可以直接使用 w 分量作为一个范围值。如果 x ,y,z 分量都位于这个范围内,就说明该顶点位于裁剪空间内,如下图所示
图1:
# 投影矩阵推导
透视投影分两步:
- 从 Frustun(视椎) 内一点投影到近裁剪平面的过程
- 由近平面到规范化设备坐标系的过程(透视除法- webgl 底层实现)
我们最后得到的 gl_Position 的坐标并不是规范化设置坐标系的坐标。 但是这个坐标带有一个 w 的值,w 值代表近大远小的一个属性。webgl 可以通过这个值进行会规范化坐标。gl_Position 是一个 vec4 类型的数据,第四个参数也就是缩放系数。
投影矩阵的推导目标:
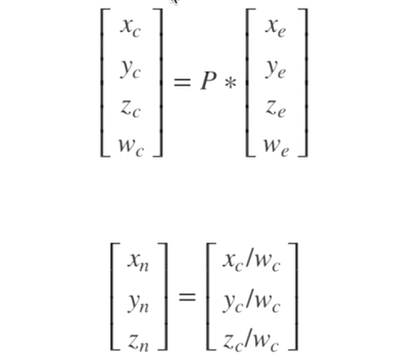
P 是透视投影矩阵,通过与坐标点进行计算得到(xc, yc, zc, wc)的视空间下的物体坐标。然后通过 xc / wc 等操作进行规范化系内的坐标。
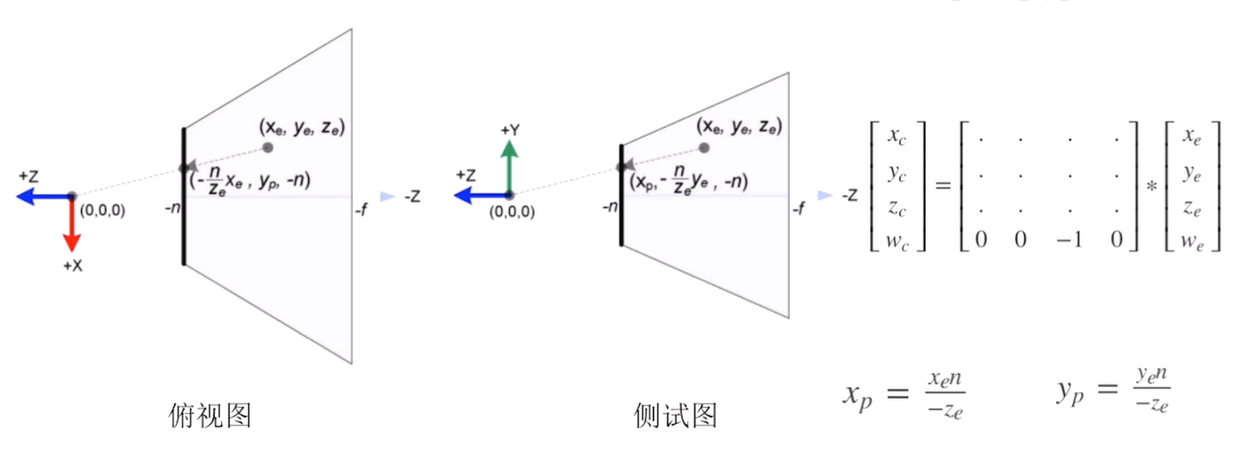
将相机坐标系中的点 p = (xe, ye, ze) 投影到投影平面,得到点:p' = (xp, yp, -nearVal)
在俯视图中,可以看到两个相似三角形,xp/xe = -n/ze,所以 xp 就等于 - (xe*n) / ze;从侧视图可以得到 yp = -(ye * n) / ze;我们可以看到 xp 与 yp 都是除了 -ze,所以我们可以看到最终的 w(缩放系数)为 -ze^1。这样就得到了下图右侧矩阵:
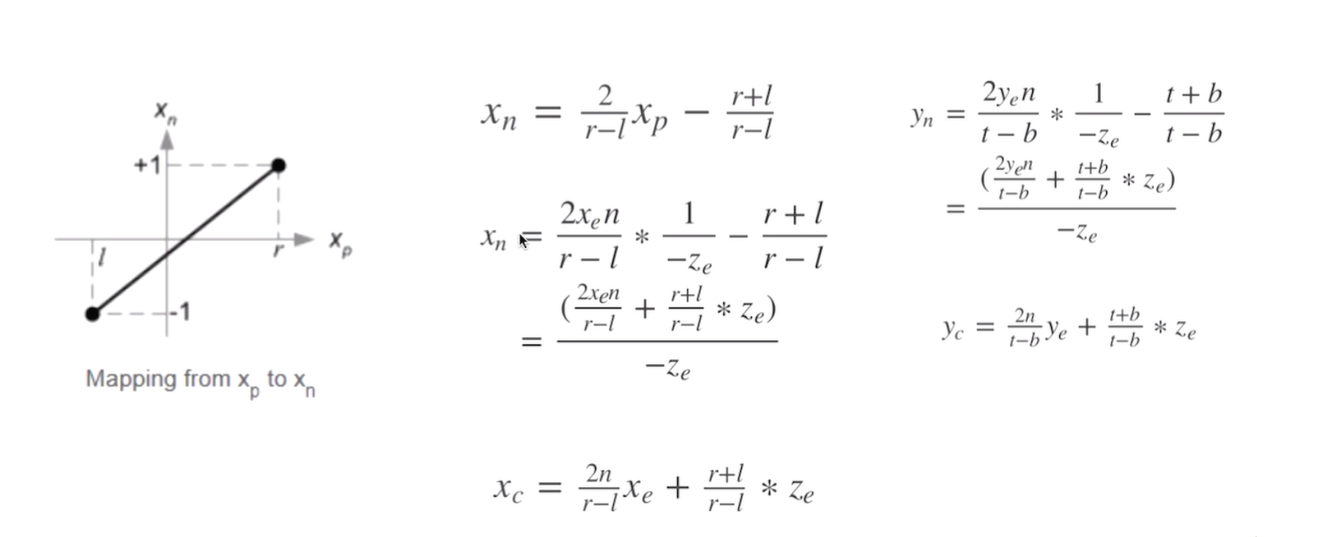
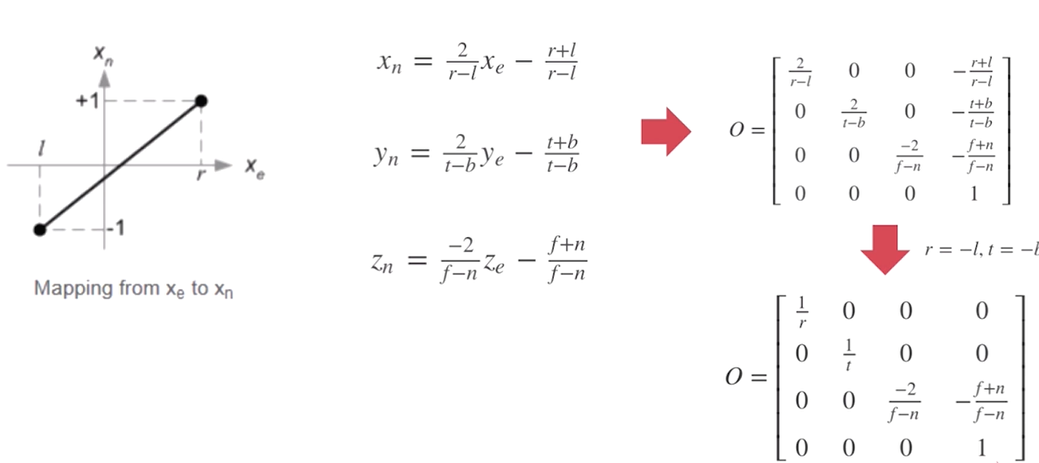
接下来就是将近平面中的坐标映射到 webgl 坐标系下;由 xp(近裁剪平面上的投影坐标) 映射到 xn(规范化设备坐标系中的坐标); 将图 1 中的 l(近裁剪平面的左边) 点会映射到 -1,将 r(近裁剪平面的右边) 点映射到 +1。
xp 的范围是[l, r],xn 的范围是 [-1, 1],可以利用简单的线性插值的方式获得以下关系式。

然后根据上面的式子以及前面推导的 xp 的结果带入,得到下面的结果:
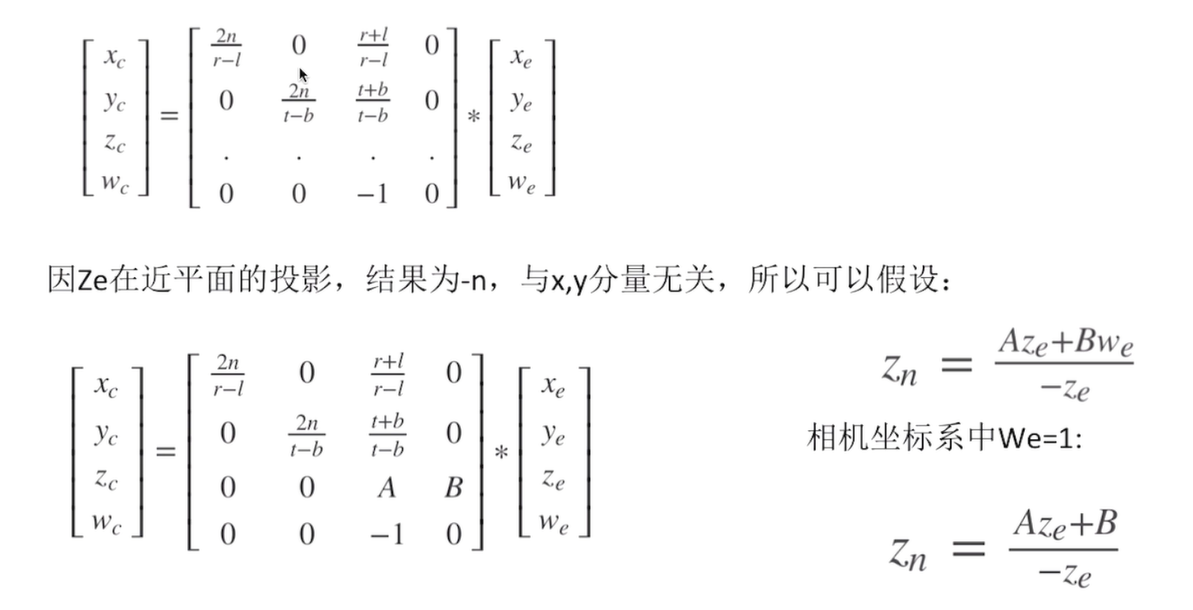
根据前面的 w 假设为 -ze^1,得到 xc 以及 yc
然后我们得到了下面的一个 p 矩阵:
最后看看 zn ,当视锥体内的顶点投影到近裁剪平面(near clip plane)的时候,实际上 zp 的值已经没有意义了,因为所有近裁剪平面(near clip plane)上的点,他们的 zp 值都是 -n,看起来我们甚至可以抛弃这个 zp 值,可以么?当然不行!不要忘记还有深度测试。 xe、ye、ze)最小的,所以 zp 可以直接保存为 ze 的值。由于在光栅化的过程中,要进行 z 坐标的倒数的插值,因此映射函数应为 1 / z 的函数,同时允许深度投影是线性插值,则可以获得以下映射函数 zn 的表达式:
利用 zn 与 ze 的映射关系为:(-n, -1) 和 (-f, 1)
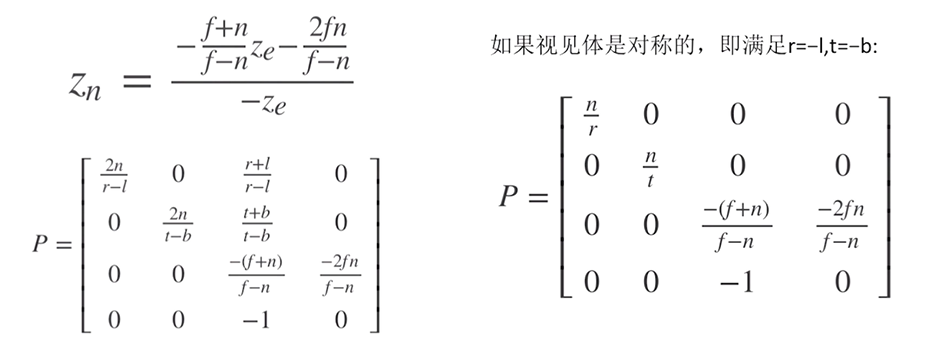
上面式子中的一些参数替换后,如下:
参考:https://zhuanlan.zhihu.com/p/181696883
# 正交投影推导
xe, ye, ze 相机中的坐标 xp、yp、zp 近裁剪平面(near clip plane)上的投影坐标 xn、yn、zn 规范化设备坐标系(Normalized Device Coordinates)中的坐标
正交投影分两步:
- 从 Frustum 内一点投影到近裁剪平面的过程
- 由近平面到规范化设备坐标系的过程
根据上面的关系,推导如下:
# 示例代码
# 透视投影
Matrix4.prototype.perspective = function(fovy, aspect, near, far) {
// 作用在当前已有的矩阵上
return this.concat(new Matrix4().setPerspective(fovy, aspect, near, far));
};
/**
* 计算透视投影矩阵
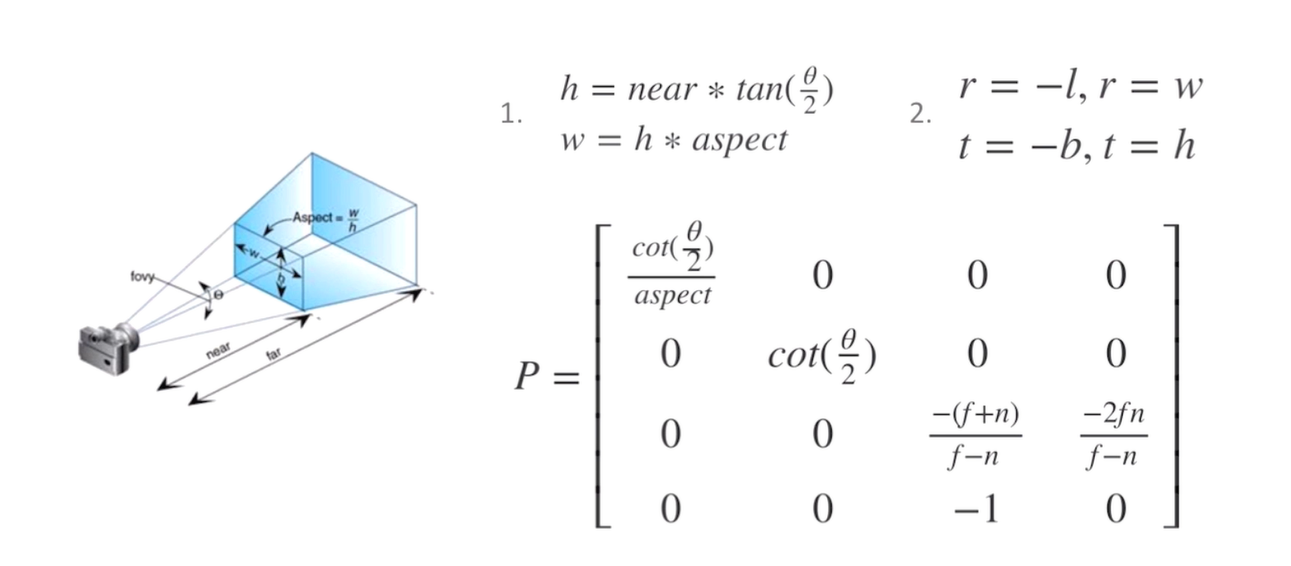
* @param fovy 视锥的上,下侧之间的角度。
* @param aspect 视锥的长宽比. (width/height)
* @param near 到近裁剪平面的距离,必须为正值.
* @param far 远裁剪平面的距离,必须为正值.
* @return this
*/
Matrix4.prototype.setPerspective = function(fovy, aspect, near, far) {
var e, rd, s, ct;
if (near === far || aspect === 0) {
throw 'null frustum';
}
if (near <= 0) {
throw 'near <= 0';
}
if (far <= 0) {
throw 'far <= 0';
}
// 角度转换为弧度制
fovy = Math.PI * fovy / 180 / 2;
s = Math.sin(fovy);
// fovy 没有视空间
if (s === 0) {
throw 'null frustum';
}
rd = 1 / (far - near);
ct = Math.cos(fovy) / s;
e = this.elements;
e[0] = ct / aspect;
e[1] = 0;
e[2] = 0;
e[3] = 0;
e[4] = 0;
e[5] = ct;
e[6] = 0;
e[7] = 0;
e[8] = 0;
e[9] = 0;
e[10] = -(far + near) * rd;
e[11] = -1;
e[12] = 0;
e[13] = 0;
e[14] = -2 * near * far * rd;
e[15] = 0;
return this;
};
Matrix4.prototype.concat = function(other) {
var i, e, a, b, ai0, ai1, ai2, ai3;
// Calculate e = a * b
e = this.elements;
a = this.elements;
b = other.elements;
// If e equals b, copy b to temporary matrix.
if (e === b) {
b = new Float32Array(16);
for (i = 0; i < 16; ++i) {
b[i] = e[i];
}
}
for (i = 0; i < 4; i++) {
ai0=a[i]; ai1=a[i+4]; ai2=a[i+8]; ai3=a[i+12];
e[i] = ai0 * b[0] + ai1 * b[1] + ai2 * b[2] + ai3 * b[3];
e[i+4] = ai0 * b[4] + ai1 * b[5] + ai2 * b[6] + ai3 * b[7];
e[i+8] = ai0 * b[8] + ai1 * b[9] + ai2 * b[10] + ai3 * b[11];
e[i+12] = ai0 * b[12] + ai1 * b[13] + ai2 * b[14] + ai3 * b[15];
}
return this;
};
# 正射投影
/**
* 设置正交投影矩阵.
* @param left 剪裁平面左侧的坐标.
* @param right 剪裁平面右侧的坐标.
* @param bottom 裁剪平面底部的坐标.
* @param top 裁剪平面的顶部坐标.
* @param near 近裁剪平面的距离。如果平面要在查看器后面,则此值为负.
* @param far 远裁剪平面的距离。如果平面要在查看器后面,则此值为负.
* @return this
*/
Matrix4.prototype.setOrtho = function(left, right, bottom, top, near, far) {
var e, rw, rh, rd;
if (left === right || bottom === top || near === far) {
throw 'null frustum';
}
rw = 1 / (right - left);
rh = 1 / (top - bottom);
rd = 1 / (far - near);
e = this.elements;
e[0] = 2 * rw;
e[1] = 0;
e[2] = 0;
e[3] = 0;
e[4] = 0;
e[5] = 2 * rh;
e[6] = 0;
e[7] = 0;
e[8] = 0;
e[9] = 0;
e[10] = -2 * rd;
e[11] = 0;
e[12] = -(right + left) * rw;
e[13] = -(top + bottom) * rh;
e[14] = -(far + near) * rd;
e[15] = 1;
return this;
};
Matrix4.prototype.ortho = function(left, right, bottom, top, near, far) {
return this.concat(new Matrix4().setOrtho(left, right, bottom, top, near, far));
};